Image-Tech is focusing on the computer vision algorithm development for 7 years, we create the "2d to 3d" image converting,Image upscaling, Iris recognition, Driver mental state detection, eye tracking, gesture control, Dual CAM photography technology in the past years.
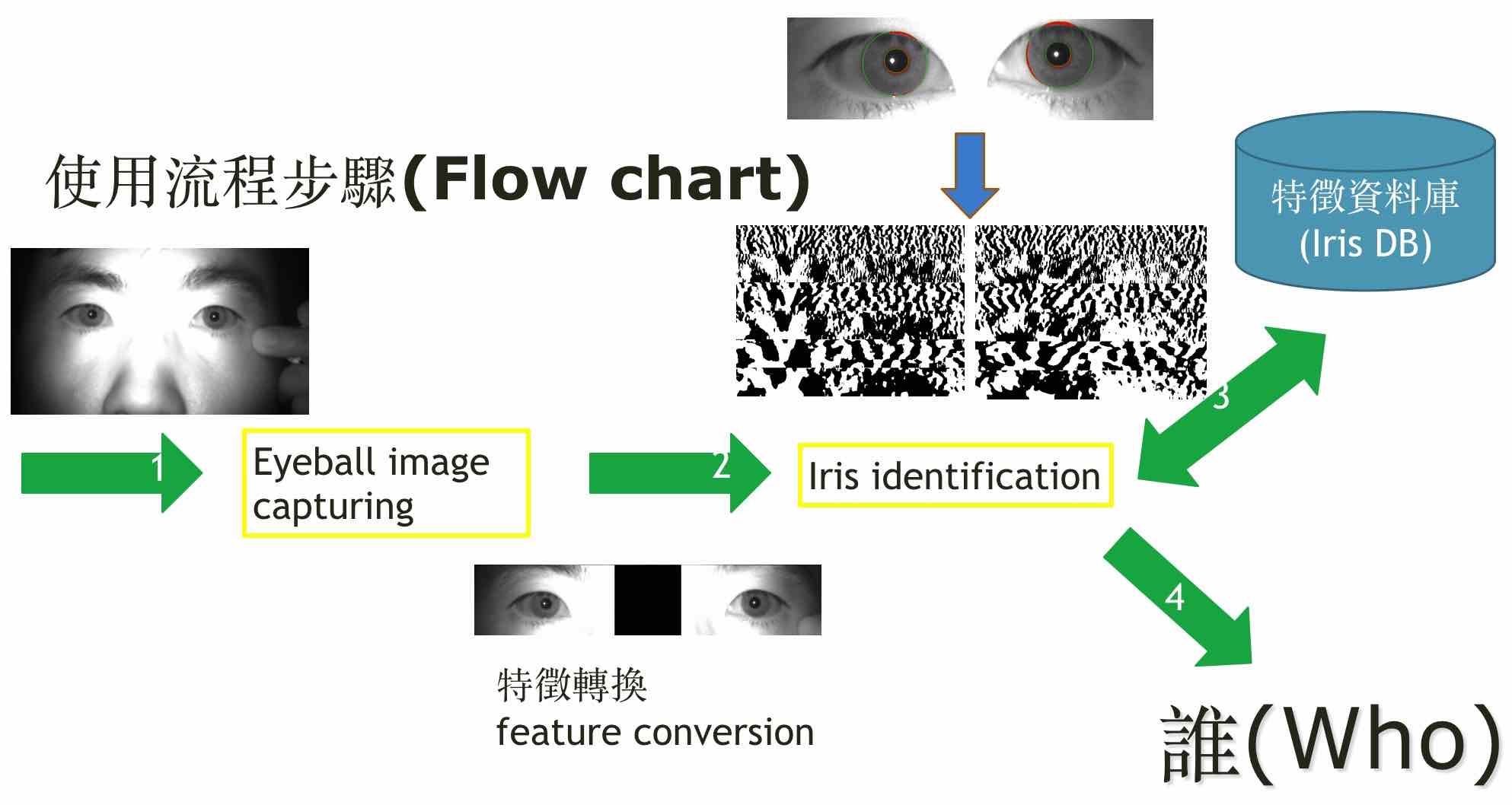
虹膜辨識 (Iris Recognition)
- 取像(eye ball image capturing):
以眼睛位置對準虹膜取像程式預設之兩孔,程式自動判斷影像清晰度將 瞳孔虹膜位置截圖取像。
- 註冊(register):
取像嚴謹,透過特定之類眼球圓框設計讓使用者主動對準眼球然後取像。
- 比對(comparison):
比對過程快速(0.1sec)所以可針對不同應用領域做取像調整。
行車記錄器疲勞偵測 (Driver Mental state detection)
利用DVR影像偵測駕駛員之頭/眼皮/嘴作判斷,經判斷有危險駕駛之可能性即由DVR輸出語音告警給駕駛員或傳送至手機app提供告警訊息。
Through DVR rear CAM to detect the driver mental status, then output the alarm message to DVR or driver smart phone.
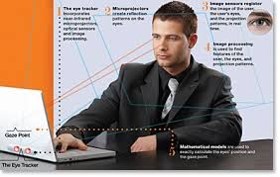
眼球追蹤 (Eye tracking)
透過可見光或紅外光取像追蹤眼球位置和動作,可取代滑鼠/觸控功能作遠端遙控,可與手勢控制應用在智能醫療及互動式螢幕。
Through CAM to detect the eye vision position to instead mouse to reach the remote control or medical purpose.

手勢控制 (Gesture control)
透過攝像頭偵測手勢位置及動作進行遠端遙控。
Through device CAM to detect the hand position and behavior, following the hand behavior to operate the display system.


手勢辨識比對流程

移動裝置與手勢控制之應用
- 提供無鍵盤裝置在各類裝置上進行即時之手勢控制
- 取代滑鼠進行螢幕快速翻頁或流覽


雙鏡頭照相 (Dual CAM photography) — 防手震/Deblur(1)



雙鏡頭照相 (Dual CAM photography) — 連拍最佳化/HDR(2)




雙鏡頭照相 (Dual CAM photography) — 前後景深切換/Refocusing(3)
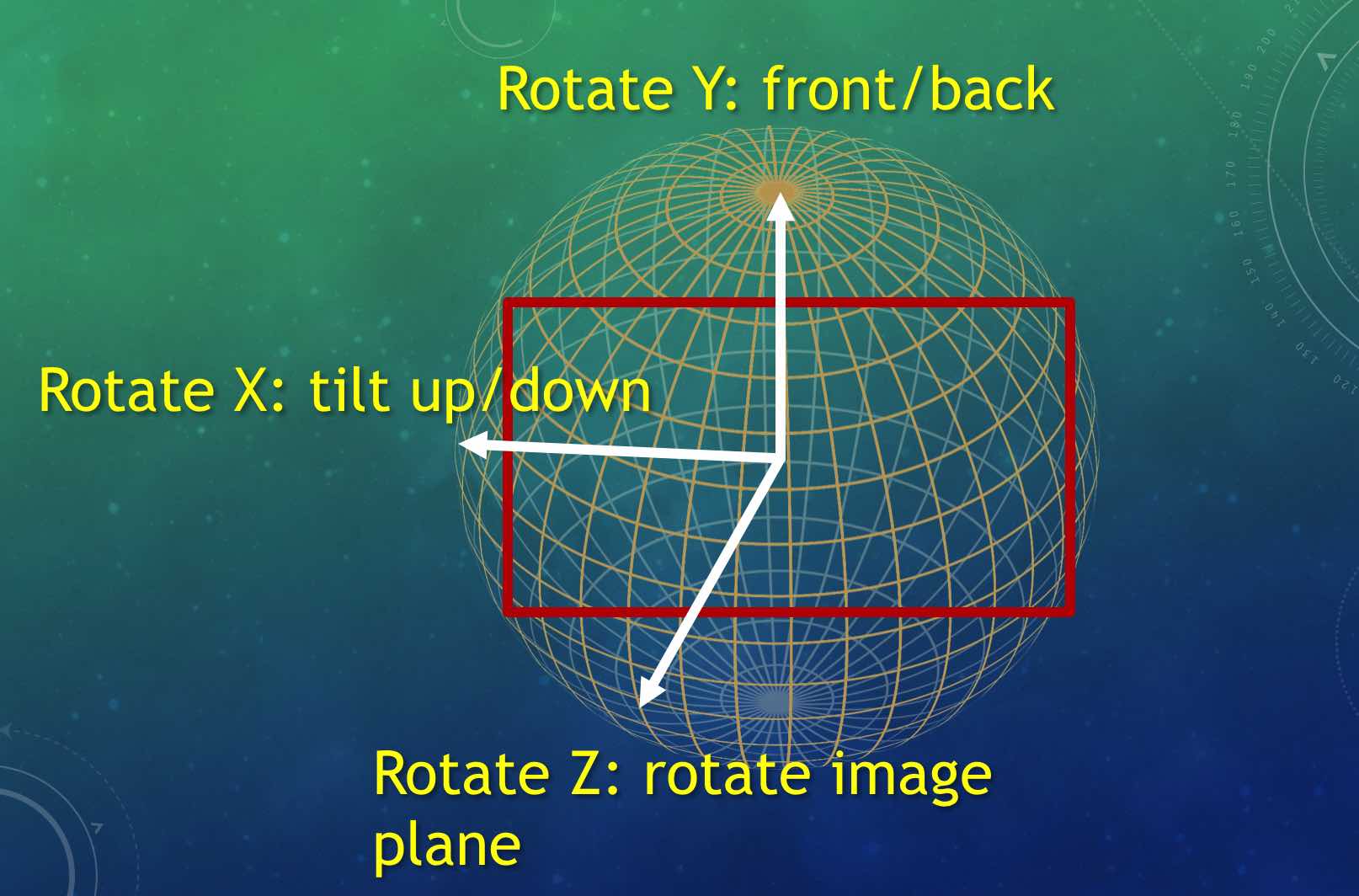
Fisheye to Equirectangular

Image file: front.png
Aperture: 210
Radius: 1024
Center: 1024 1124
Rotate [X Y Z]: [-10 0 0]

Image file: back.png
Aperture: 210
Radius: 1024
Center: 1124 1024
Rotate [X Y Z]: [0 180 -5]
Input dual-fisheye image
Fisheye to Equirectangular - front

Fisheye to Equirectangular - back
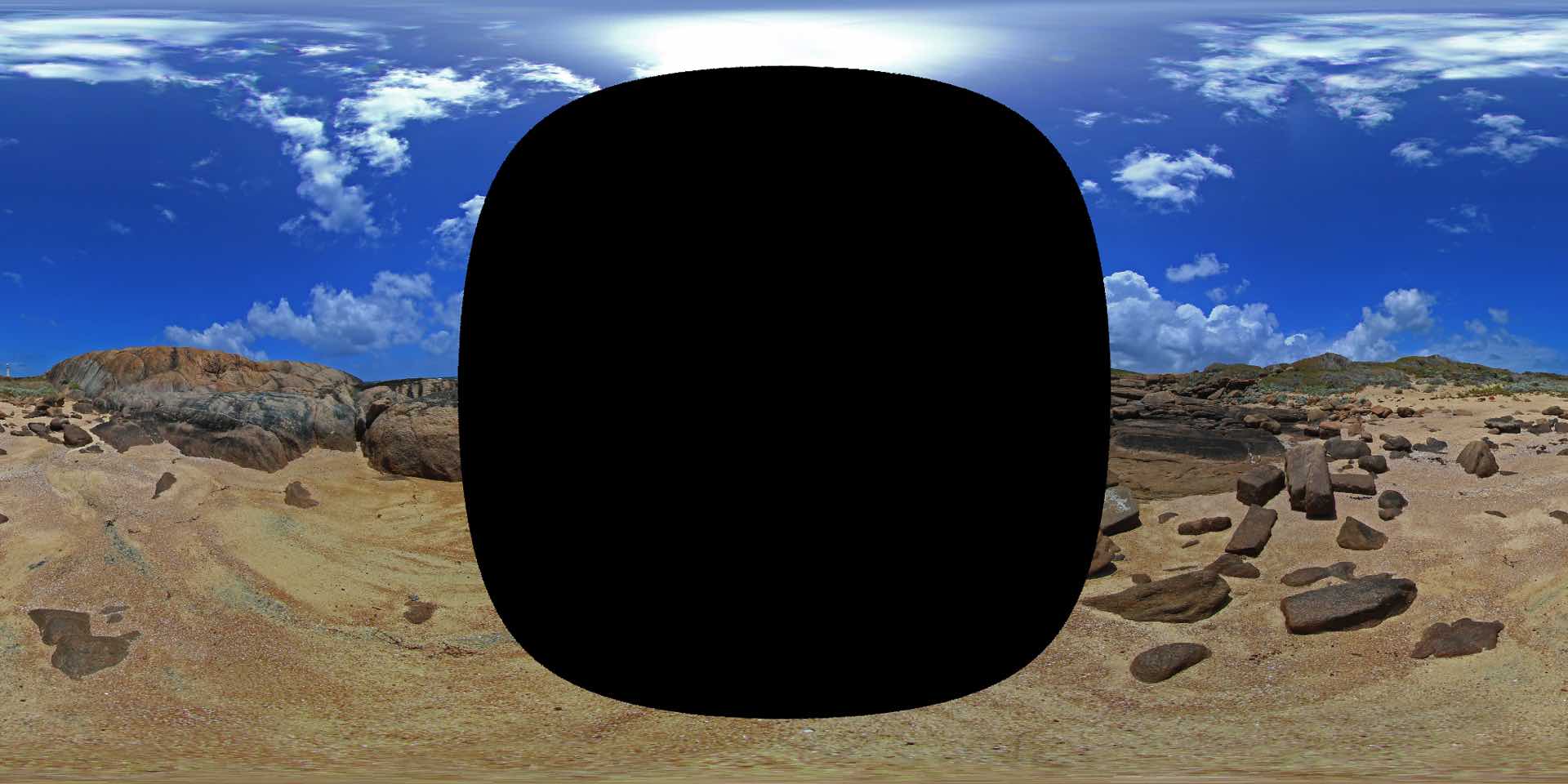
Blending

智慧型影像監控(Intelligence Video Surveillance System,簡稱IVS)
利用電腦視覺(Computer Vision)技術,主動進行人物識別及移動追蹤,提供即時且主動式的智慧影像分析功能,讓影像安全監控提升到一個新的境界。
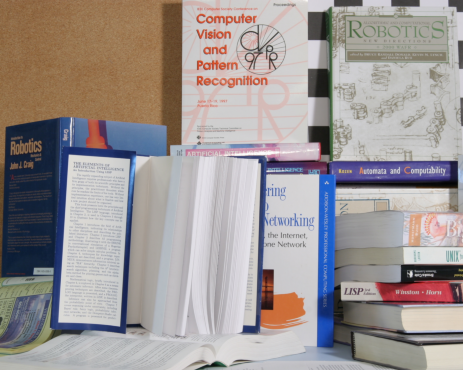
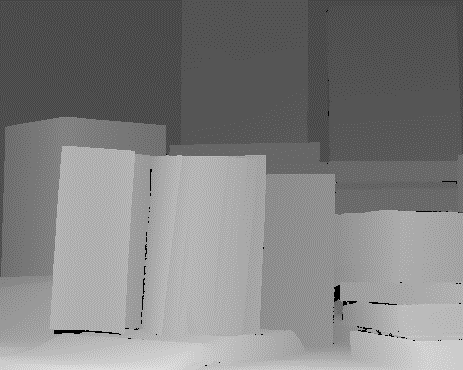
3D建模(TOF) (3D modeling)
透過IR紅外光輔助及3D晶片(TOF/time of flight)掃描物件之三維獲得點雲(point cloud)資訊再透過演算法將所需要的各種應用呈現。
Through IR scanning object three dimension data to get the reflection "point cloud" data , then adopt the algorithm to transfer the data to different kind of application.

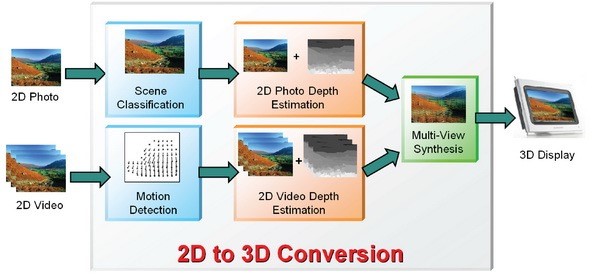
2D轉3D (2D to 3D converting)
透過連續幀比對的方式建立主要物件的景深(Depth map)圖,然後將原先單張圖像加上景深圖可生左右眼兩張圖然後再將兩張圖合成有深度的3d圖像。
Through algorithm process to create the "depth map" by the comparison of series image, then create two image(L/R) for 3D combination.
即時影像強化 (Real-time image upscaling)
針對視頻流每偵影像透過演算法將畫面內主要物件進行邊角銳化處理可使480p/720p/1080p等畫質明顯改善。
Detecting and identifying the specific object of streaming or image , then enhance the sharpness of image object by algorithm.
1080p->1080p

720p->1080p

AR — 擴增實境應用
以裝置上之攝像頭辨識視頻內容之圖卡或圖像,然後將後台視頻庫所預設好之視頻下載至圖像上方。
Through the device(smart phone/NB/PC) CAM to identify the image icon or detecting the field distance/depth then download the streaming to mix with the reality.

